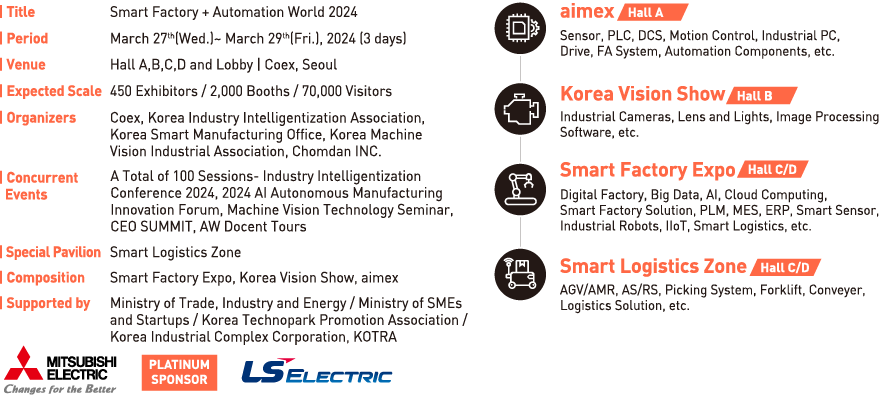
SMART FACTORY+AUTOMATION WORLD 2024
AW 2024 with Visit Seoul
Experience the future today with
Mitsubishi Electric Automation Korea
March 27th-29th, 2024
Coex 3F Hall C, #C560